As these get smaller and smaller, we get closer and closer to a dog pod grid:
Aerostat meant anything that hung in the air. This was an easy trick to pull off
nowadays. Nanotech materials were stronger. Computers were infinitesimal. Power
supplies were much more potent. It was almost difficult not to build things
that were lighter than air. . . .
Given that it was so easy to make things that would float in air, it was not
much of a stretch to add an air turbine. This was nothing more than a small
propeller, or series of them, mounted in a tubular foramen wrought through
the body of the aerostat, drawing in air at one end and forcing it out the other
to generate thrust. A device built with several thrusters pointed along
different axes could remain in one position, or indeed navigate through space.
Each aerostat in the dog pod grid was a mirror-surfaced, aerodynamic teardrop
just wide enough, at its widest part, to have contained a pingpong ball. These
pods were programmed to hang in space in a hexagonal grid pattern, about ten
centimeters apart near the ground (close enough to stop a dog but not a cat,
hence "dog pods") and spaced wider as they got higher. In this fashion a hemi-
spherical dome was limned around the sacrosanct airspace of the New Atlantis
Clave. When wind gusted, the pods all swung into it like weathervanes, and the
grid deformed for a bit as the pods were shoved around; but all of them even-
tually worked their way back into place, swimming upstream like minnows, pro-
pelling the air turbines. The 'bines made a thin hissing noise, like a razor
blade cutting air, that, when multiplied by the number of pods within earshot,
engendered a not altogether cheerful ambience. Enough wrestling with the wind,
and a pod's battery would run down. Then it would swim over and nuzzle its
neighbor. The two would mate in midair, like dragonflies, and the weaker would
take power from the stronger. The system included larger aerostats called nurse
drones that would cruise around dumping large amounts of power into randomly
selected pods all over the grid, which would then distribute it to their neigh-
bors. If a pod thought it was having mechanical trouble, it would send out a
message, and a fresh pod would fly out from the Royal Security installation be-
neath Source Victoria and relieve it so that it could fly home to be decompiled.
Power for an actual helicopter or multirotor is extraordinarily unlikely to ever be sufficient with solar, even in the short term, on a sunny day.
Power for an efficient sailplane is alright for an afternoon... but only barely have we achieved the 48-hour golden timespan with extreme size, expensive materials, good weather, and working the batteries to within an inch of their lives.
Power for a hyperblimp, which is probably the closest to what Stephenson described (but 1-2 orders of magnitude larger), is easy to provide with solar. Expect them reasonably soon in military applications.
There is experimental-but-also-just-barely-workable laser propulsion, and also what I like to call a 'Flying Pole' where a wire-tethered quadrotor sits in one place 100 meters up for a vantage point, indefinitely, with significant practical payload (this is used experimentally by various militaries).
Lastly, there is the holy grail, autonomous swarm launch, landing, and refueling, which allows a large number of quadrotors to blanket an area of several kilometers around with close-in distributed surveillance. With the right code and minimal hardware, and importantly a large enough swarm to justify infrastructure, this is highly practical, the engineering just has to be done. I have my doubts that this will be reliable for a while with small fixed wing drones - the wind and approach makes it a much harder problem than VTOL craft.
In case you're interested, UAV construction is now a large sector of the RC aeromodelling hobby. I've tried to catalog developments on my wiki, http://dronepedia.com , but it's a firehose of information out there. If you want to dip your toes in, check out a day's discussion on http://diydrones.com
Reminds me of one of my graduate classes, which was about designing distributed operating systems for such things (we used TinyOS: http://en.wikipedia.org/wiki/TinyOS):
I did it, too. I used TinyOS and Intelmote2 and designed a interface board to integrate Intelmote2 devices with SRV-1 tank robots. nesC has some learning curve, but it was fun experience :)
> As a result, hazardous elements such as the assemblers, the bacteria, and the nanobots were blown into the desert, evolving and eventually forming autonomous swarms. These swarms appear to be solar-powered and self-sufficient, reproducing and evolving rapidly. The swarms exhibit predatory behavior, attacking and killing animals in the wild, using code that Jack himself worked on. Most alarmingly, the swarms seem to possess rudimentary intelligence, the ability to quickly learn and to innovate. The swarms tend to wander around the fab plant during the day but quickly leave when strong winds blow or night falls.
I was speculating about this with a friend the other day.
The problem is the battery recharge time is way more than the flight time. You need better than 1:1 for this to work.
Beamed power (sufficient to power something's lift) is going to have a scary energy density.
Maybe mechanical energy storage is the way to go; use counter-rotating flywheels that you can spin up rapidly, and then bleed off rotational power directly into the fans. Use a battery for powering control circuitry only.
What was the point of this dog pod grid? It sounds like a cross between a surveillance network ("Royal Security") and a simulation of biology (mating, nursing, etc.).
I wonder what it will be like in a decade or so looking back on the lovely period where only the US Government had lethal drones, and operated them with relative restraint.
> I wonder what it will be like in a decade or so looking back on the lovely period where only the US Government had lethal drones, and operated them with relative restraint.
You are exactly right. Except of course that the current 'relative restraint' is in the eye of the beholder, and it probably doesn't seem like 'relative restraint' to those living in certain areas of Pakistan.
But yeah, soon enough that'll be all of us. We're in for a world of horror. If we were wise, we'd be establishing the idea that military drones are to be prohibited by international treaty and considered a war crime, not normalizing them.
A international treaty would probably not work well, since military drones are actually useful for combat. Unlike biological weapons, were the victim has two weeks of incubation period to defeat you, or chemical weapons, which are quite useless against hardened targets. ( And since WWII there was no conflict which came close to the nuclear threshold.) Therefore an AI arms control regime would be a lot harder to construct than a WMD one.
Having said that, I am actually not very pessimistic about drones. I think that they are similar to cars, which enable a quick get away for the perpetrators of a crime, but are in fact more dangerous in accidents than as means of a crime. ( And similar, if there are thousands of pizza delivery drones then some of them will fall out of the sky by pure statistics.)
landmines are useful for combat too. Oh yeah, the US refuses to sign that one too, right?
If it wasn't useful for combat, nobody would use it, right? You only need international law to try and prevent things that _are_ useful in military objectives, but are so dangerous to humanity that we wish to prevent their use.
Personal airplanes already exists, that does not mean people fly around and hit buildings or shoot people. There are aviation regulations in place and airspace is heavily regulated. I don't think drones will be any different regardless their size. If a tiny drone can fly miles in any direction for hours it could be banned outdoors or limited to certain areas.
Of course you know, this means that the next stage is laser based defense systems.
It's gonna be a lot easier to fry something traveling slower than the speed of sound from a few hundred feet away than something travelling at orbital velocities miles away.
I'm more worried about micro-UAVs and other bugs than I am about the big ones. I assume SCIFs of the future will basically have real airlocks and some comprehensive scanning of people who go in and out.
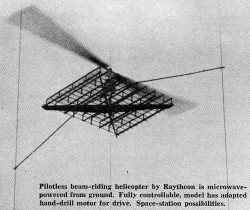
There are examples of wireless UAV recharging, even during flight, dating back to the 1960s [1]. MIT researchers have also built UAVs that perch on power lines for (eventual) recharging [2].
Apologies for the self-indulgent links -- I wrote the articles, so they were easy for me to locate. ;-)
What Brown did with wireless energy transfer back in the 60's is very impressive. But calling that contraption a helicopter is generous at best. Calling it a UAV is downright misleading.
The point was simply: it is possible to transfer meaningful amounts of power to an aerial platform to keep it aloft. LaserMotive still works in this space using directed laser light, funded (IIRC) by NASA.
From a practical perspective, wireless power transfer (of pretty much every form) can have major drawbacks... but they're "rearranged" in the system to make 'em palatable. For example, the system as a whole may be incredibly lossy -- but that's predominantly at the ground station where you have ample access to power. Often, you're willing to accept 10% conversion efficiency when 100% of the converted power is useful to the target (think of RFID tags). In other cases, the benefits of near-field (short-range) inductive charging are (1) lack of wires and (2) more robust physical design (check out Sphero). TL;DR: there are circumstances where all these things make sense, but it's very application and system specific.
As for your take on acronyms... UAV => Unmanned Aerial Vehicle. Brown's contraption flew (albeit attached to guide wires for stability) without an occupant. What would you call it?
Absolutely! I didnt mean to derail from your main point. I've worked with LaserMotive so I'm reasonably familiar with their technology.
You can make a ping-pong ball hover in an upward column of air, but I wouldn't call the ping-pong ball a UAV. It's just semantics, but I think the term implies a certain level of autonomy. Another example, there are many radio controlled aircraft in the hobby world that I would not call UAVs. One could take the same r/c vehicle, integrate an autopilot, and then UAV might be a more appropriate term for it.
In my view, anything with Return To Home level autopilot and above could reasonably be considered a UAV. This generally requires a 6-9DOF IMU, an altimeter, and a GPS receiver.
But it can reload by itself, so flying time should be increased. ( It would be cool to build something that you can reload the drone in the air. Some kind of Tesla coil for example. :)
A quad copter actually requires a lot of energy to stay aloft. Folks who build regular quads, using 2000 ... 3500 mAh batteries, get something like 10 ... 15 min flight time. That's a lot of energy going down the wind.
You might be able to juice it up in midair, but the field would have to be somehow focused on the quad, otherwise you'll never get the required power density.
That would be something in the range of a 20 W at the drone. So something like a modified microwave oven should do it. ( The drone flies into the oven, recharges in flight, flies out when charged.) That has the additional advantage that no 200 W radio emitters are jamming all cell phones in the neighborhood.
It's gonna be tough on the batteries. If you want any sort of decent battery life, the charge current must be pretty small - at least compared to the max discharge current.
It promises better hardware (Cortex-A9 SoC, 1.0-1.5GHz CPU, 1GB RAM, SD card, 2.4GHz/5GHz Wi-Fi and Bluetooth), at a third of the price (MSRP: $49).
But again, it's not real (yet?) - whereas the pre-order of the Crazyflie Nano has at least already started. And they seem to have a firm shipping date.
Very cool. Though the 7 minute flight time is rather disappointing.
I know this would increase costs a LOT but it would be awesome if it could be redesigned to use smaller chips and put more of the weight to the battery.
On that can anyone explain to me why they positioned the batter on the top of the device? Wouldn't it be better balanced to have placed it below the body? Not that stability looked like an issue just seems like an odd design choice.
> Very cool. Though the 7 minute flight time is rather disappointing.
It's pretty standard for any electric copter these days. It's a simple matter of energy density.
If you go on hobbyking.com and build a standard-size quad from parts, you won't get much more flight time than that. Somewhat better, sure, but not a whole lot.
This is reason #387 why we need a revolution in energy storage.
I get 13 minutes out of a 3300mAh 3S Turnigy "nano-tech." 10x4.5 props, 1100kv motors.
My payload capacity isn't particularly high but a GoPro sans case is only just over 90 grams, so it works fine.
I do agree that we're reliant on advancements in energy storage to push the flight time envelope, but improving even nearly twofold on 7 minutes isn't particularly difficult.
7 minute flight time is a bit short, but on the other hand the charge time is only 20 minutes.
I think I might get one and try to make some sort of induction charging / IR base-station seeking setup, like a roomba. Probably makes the most sense to put the IR beacon on the chopper and have a webcam in the base-station guide it back for charging.
Yup, for values of "close" that are 3.5 minutes away, which seems pretty far considering how fast those things seem to move. I imagine the real limit will be radio range (you might be able to use some inertial guidance to get the device back into the general area to be able to pick up the IR beacon).
This reminds me of a novel I recently finished. For those of you who have not read Kill Decision by Daniel Suarez, I highly suggest it. It is a very interesting story about drone warfare and artificial intelligence. This quadcopter is eerily similar to the ones described in his novel.
My first thought is to make Quadcopter obstacle courses for group racing. Combine that with augmented reality power-ups that you could use to freeze an opponent and we have a Mario Kart Racing style game.
It would be cool to keep the racers on a set path (like a floating road) with a certain boundary so they would not deviate too far from the width of the imaginary path, and have the pilots fly within it to make it a more "closer" race
I've thought about that too. If you could get the signals to penetrate, racing through the woods with first person view would be agonizingly close to actually riding a speeder bike on Endor.
They are doing this through Seeedstudios (the number of 'e's is important!) who, when I was with Google, we did a group buy of their digital oscilloscope kits. It turned out quite well so I wasn't worried about pre-ordering through them.
Now to think up some exceptionally opsish type thing to do with them, there is data center re-con of course but I was thinking like "go sit on the bad top of rack switch and blink your LED" kinds of things.
This device has an onboard camera and a decent microcontroller (32 bit MCU @ 72 MHz (128kb flash, 20kb RAM)). This is just begging to have OpenCV running on it.
I wish I was a programmer so I could build one and just fly it around. I know that's not the purpose and it specifically says it's not for toying around, but with a camera I think this is really cool. Who wants to make one for me for an additional cost? :)
They look like remarkably fun toys but I agree with you, TMZ and the paparazzi media will be who really pushes this stuff to the next level. At least that's how the world looks to me.
CB is actually a pretty tough material. It's a type of fiberglass after all, or a composite material anyway. Very hard to break, speaking from years of working with it. Since you need electric circuits anyway, and a material that's not heavy but sturdy, you could stomp two birds with one stone and use CB instead.
It's a pretty popular solution among those who build small quads.
I assume it's mostly to keep weight down. I imagine it could also make manufacture easier/cheaper; you'd need most of the board for the circuitry anyway, so why spend more money a separate piece for the chassis?
Also: I don't know if you've ever tried to break or cut a circuit board but it's pretty tough stuff for its weight too.
{kind=link}